som vi så i et par KRYDDERIANALYSER tidligere i dette kapitel, varierer udgangsspændingen på en transformer nogle med varierende belastningsmodstande, selv med en konstant spændingsindgang.
variansgraden påvirkes blandt andet af de primære og sekundære viklingsinduktanser, hvoraf ikke mindst inkluderer viklingsmodstand og graden af gensidig induktans (magnetisk kobling) mellem de primære og sekundære viklinger.
til strømtransformatorapplikationer, hvor transformeren ses af belastningen (ideelt set) som en konstant spændingskilde, er det godt at have den sekundære spænding variere så lidt som muligt for store afvigelser i belastningsstrøm.
Spændingsreguleringsformel
målingen af, hvor godt en strømtransformator opretholder konstant sekundær spænding over en række belastningsstrømme, kaldes transformatorens spændingsregulering. Det kan beregnes ud fra følgende formel:

Hvad er”fuld belastning”?
“fuld belastning” betyder det punkt, hvor transformeren arbejder ved maksimal tilladt sekundærstrøm. Dette driftspunkt bestemmes primært af viklingstrådstørrelsen (ampacity) og metoden til transformerkøling.
når vi tager vores første SPICE transformer-simulering som et eksempel, lad os sammenligne udgangsspændingen med en 1 k-belastning versus en 200-belastning (forudsat at 200-belastningen vil være vores “fulde belastning” – tilstand). Husk, hvis du vil, at vores konstante primære spænding var 10,00 volt AC:
freq v(3,5) i(vi1) 6.000E+01 9.962E+00 9.962E-03 Output with 1k ohm load freq v(3,5) i(vi1) 6.000E+01 9.348E+00 4.674E-02 Output with 200 ohm load
bemærk, hvordan udgangsspændingen falder, når belastningen bliver tungere (mere strøm). Lad os nu tage det samme transformerkredsløb og placere en belastningsmodstand med ekstremt høj størrelse på tværs af sekundærviklingen for at simulere en “no-load” – tilstand: (se” transformer “krydderiliste”)
transformer v1 1 0 ac 10 sin rbogus1 1 2 1e-12 rbogus2 5 0 9e12 l1 2 0 100 l2 3 5 100 k l1 l2 0.999 vi1 3 4 ac 0 rload 4 5 9e12 .ac lin 1 60 60 .print ac v(2,0) i(v1) .print ac v(3,5) i(vi1) .end
freq v(2) i(v1) 6.000E+01 1.000E+01 2.653E-04 freq v(3,5) i(vi1) 6.000E+01 9.990E+00 1.110E-12 Output with (almost) no load
så vi ser, at vores output (sekundær) spænding spænder over en rækkevidde på 9.990 volt ved (næsten) ingen belastning og 9.348 volt på det tidspunkt, vi besluttede at kalde “fuld belastning.”Beregning af spændingsregulering med disse tal får vi:
i øvrigt ville dette blive betragtet som ret dårlig (eller “løs”) regulering for en strømtransformator. Ved at drive en simpel resistiv belastning som denne skal en god strømtransformator udvise en reguleringsprocent på mindre end 3%.
induktive belastninger har tendens til at skabe en tilstand af dårligere spændingsregulering, så denne analyse med rent resistive belastninger var en “bedste tilfælde” tilstand.
applikationer, der kræver “dårlig” regulering
der er dog nogle applikationer, hvor dårlig regulering faktisk ønskes. Et sådant tilfælde er i afladningsbelysning, hvor en trin-up transformer er påkrævet for oprindeligt at generere en højspænding (nødvendigt for at “antænde” lamperne), så forventes spændingen at falde, når lampen begynder at trække strøm.
dette skyldes, at udladningslampernes spændingskrav har tendens til at være meget lavere, efter at der er etableret en strøm gennem lysbuebanen. I dette tilfælde er en step-up transformer med dårlig spændingsregulering tilstrækkelig til opgaven med at konditionere strøm til lampen.
en anden applikation er i strømstyring til AC-lysbuesvejsere, som ikke er andet end nedtrapningstransformatorer, der leverer lavspænding, højstrøm til svejseprocessen.
en højspænding ønskes for at hjælpe med at “slå” buen (få den i gang), men ligesom udladningslampen kræver en bue ikke så meget spænding for at opretholde sig selv, når luften er opvarmet til ioniseringspunktet. Således ville et fald i sekundær spænding under høj belastningsstrøm være en god ting.
nogle buesvejsningskonstruktioner giver buestrømjustering ved hjælp af en bevægelig jernkerne i transformeren, der er drejet ind eller ud af viklingsenheden af operatøren.
flytning af jernsneglen væk fra viklingerne reducerer styrken af magnetisk kobling mellem viklingerne, hvilket mindsker sekundær spænding uden belastning og giver dårligere spændingsregulering.
Ferroresonant Transformer
ingen redegørelse for transformatorregulering kunne kaldes komplet uden omtale af en usædvanlig enhed kaldet en ferroresonant transformer.
“Ferroresonance” er et fænomen forbundet med opførelsen af jernkerner, mens de opererer nær et punkt med magnetisk mætning (hvor kernen er så stærkt magnetiseret, at yderligere stigninger i viklingsstrøm resulterer i ringe eller ingen stigning i magnetisk strøm).
mens det er noget vanskeligt at beskrive uden at gå dybt ind i elektromagnetisk teori, er ferroresonant transformer en strømtransformator konstrueret til at fungere i en tilstand af vedvarende kernemætning.
det vil sige, at dens jernkerne er “fyldt fuld” af magnetiske strømningslinjer for en stor del af VEKSELSTRØMSCYKLUSSEN, så variationer i Forsyningsspænding (primær viklingsstrøm) har ringe effekt på kernens magnetiske strømningstæthed, hvilket betyder, at sekundærviklingen udsender en næsten konstant spænding på trods af betydelige variationer i forsyningsspændingen (primær viklingsspænding).
resonanskredsløb i Ferroresonanttransformatorer
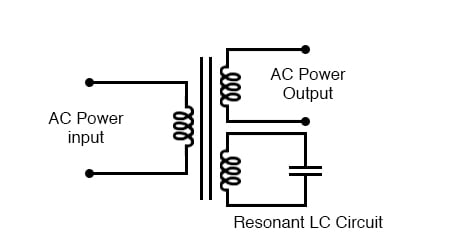
normalt resulterer kernemætning i en transformer i forvrængning af sinusbølgeformen, og ferroresonanttransformatoren er ingen undtagelse. For at bekæmpe denne bivirkning har ferroresonanttransformatorer en ekstra sekundær vikling parallelt med en eller flere kondensatorer, der danner et resonanskredsløb indstillet til strømforsyningsfrekvensen.
dette “tankkredsløb” fungerer som et filter til at afvise harmoniske skabt af kernemætningen og giver den ekstra fordel ved at lagre energi i form af VEKSELSTRØMSOSCILLATIONER, som er tilgængelig til opretholdelse af udgangsviklingsspænding i korte perioder med indgangsspændingstab (millisekunder værd af tid, men bestemt bedre end intet).
Ferroresonant transformer giver spændingsregulering af udgangen.
ud over at blokere harmoniske skabt af den mættede kerne “filtrerer dette resonanskredsløb også” harmoniske frekvenser genereret af ikke-lineære (skifte) belastninger i sekundærviklingskredsløbet og eventuelle harmoniske, der findes i kildespændingen, hvilket giver “ren” strøm til belastningen.
Ferroresonant transformere tilbyder flere funktioner, der er nyttige i VEKSELSTRØMSKONDITIONERING: konstant udgangsspænding givet betydelige variationer i indgangsspænding, harmonisk filtrering mellem strømkilden og belastningen, og evnen til at “ride gennem” korte tab i magt ved at holde en reserve af energi i sin resonant tank kredsløb.
disse transformatorer er også meget tolerante over for overdreven belastning og forbigående (øjeblikkelige) spændingsstød. De er faktisk så tolerante, at nogle kort kan paralleliseres med usynkroniserede VEKSELSTRØMSKILDER, hvilket gør det muligt at skifte en belastning fra en strømkilde til en anden på en “make-before-break” – måde uden afbrydelse af strømmen på den sekundære side!
kendte ulemper ved Ferroresonanttransformatorer
desværre har disse enheder lige så bemærkelsesværdige ulemper: de spilder meget energi (på grund af hysteresetab i den mættede kerne) og genererer betydelig varme i processen og er intolerante over for frekvensvariationer, hvilket betyder, at de ikke fungerer særlig godt, når de drives af små motordrevne generatorer med dårlig hastighedsregulering.
spændinger produceret i resonansviklings – /kondensatorkredsløbet har tendens til at være meget høje, hvilket nødvendiggør dyre kondensatorer og præsenterer serviceteknikeren for meget farlige arbejdsspændinger. Nogle applikationer kan dog prioritere ferroresonant-transformatorens fordele i forhold til dens ulemper.
halvlederkredsløb eksisterer for at “konditionere” vekselstrøm som et alternativ til ferroresonante enheder, men ingen kan konkurrere med denne transformer med hensyn til ren enkelhed.
anmeldelse:
- spændingsregulering er målet for, hvor godt en strømtransformator kan opretholde konstant sekundær spænding givet en konstant primær spænding og bred varians i belastningsstrøm. Jo lavere procentdel (tættere på nul), jo mere stabil sekundær spænding og jo bedre regulering vil den give.
- en ferroresonant transformer er en speciel transformer designet til at regulere spænding på et stabilt niveau på trods af stor variation i indgangsspænding.
RELATEREDE REGNEARK: