senseFlyは、2009年以来業界のパイオニアであるfix eBeeで最も広く知られているスイスのドローン会社です。 スイスの企業でもあるWingtraは、測量およびマッピングアプリケーションのための垂直離着陸(VTOL)ドローン技術にのみ焦点を当てています。 ここでは、無人偵察機の究極の長期的な比較が続くあなたの要約です。
要約:VTOL対固定翼
質のスイスの無人機、eBee XおよびWingtraOneは両方明確な理由のための調査そして地図を描く分野を導く:eBee Xは十分工業化され、信頼できる固定翼の調査およ
どちらもマルチコプターの7倍から14倍の面積をカバーしていますが、WingtraOneは同じGSDでeBee Xよりもほぼ2倍の面積をカバーできます。 しかし、これらの2つの無人機を最も区別するのは、離陸と着陸技術です。
WingtraOneは垂直離着陸(VTOL)に依存してマルチコプターのように離着陸し、広い領域をカバーするために固定翼に移行します。 EBee Xは腹の手の進水そして土地を要求する従来の固定翼の無人機である。
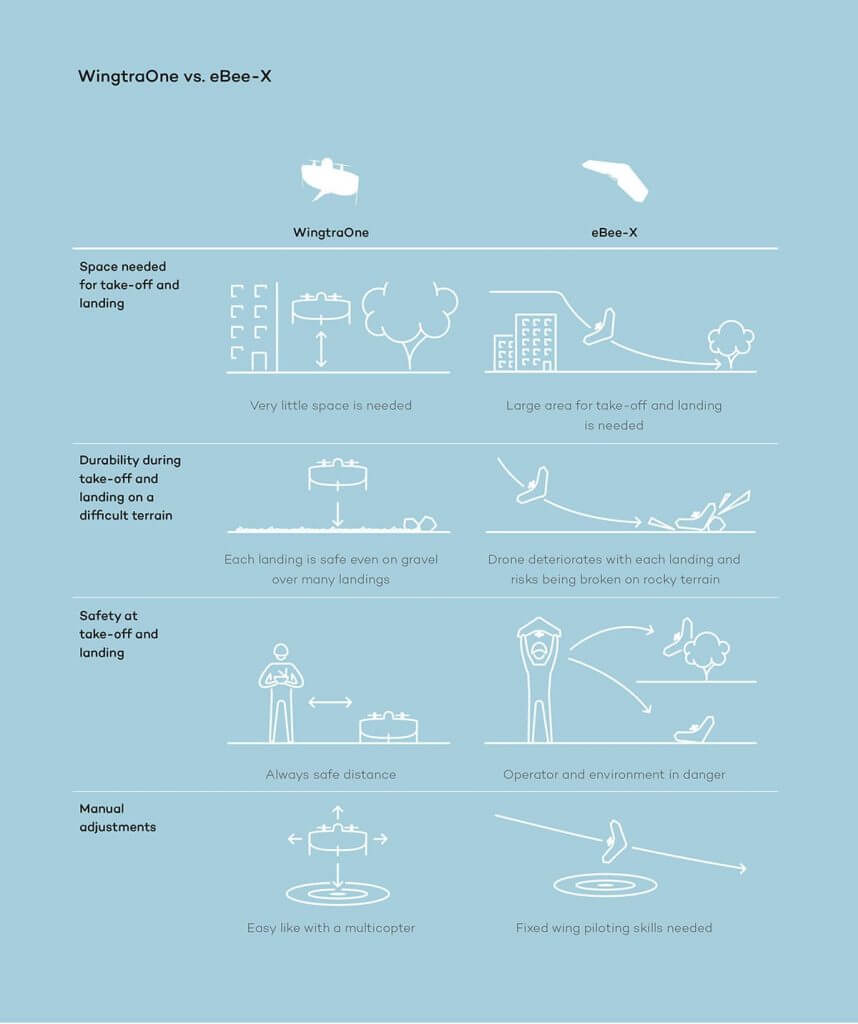
あなたが着陸するたびに、あなたの無人機が地面に影響を与えると考えると、Belly landingはあなたの無人機のROIに多くの制限をもたらします。 これらの着陸は衝撃を移し、繰り返された使用を用いる技術そしてペイロードを身に着け、そして損なうことができます。 さらに、各打ち上げと土地が広いクリアランスで、それをサポートするのに十分な乾燥した柔らかい地形で起こることを確認する必要があります。
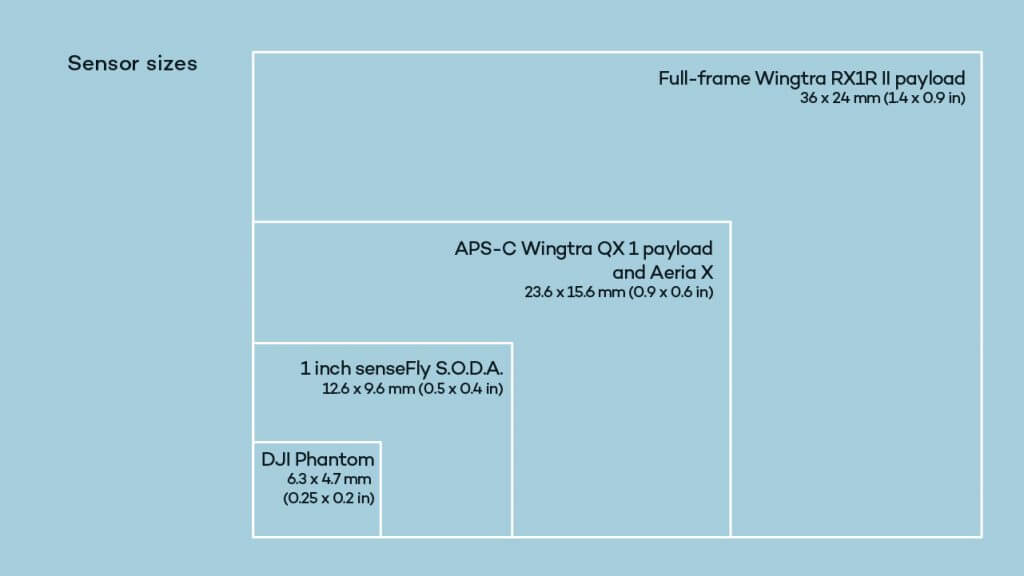
ハイエンドの空中マッピングカメラは重く、eBee Xのような固定翼はその重量のためにそれらを運ぶことができません。 現在、VTOLドローンだけが42MPの画像解像度を提供することができ、これはより良い精度に変換され、最終的にはより信頼性の高い地図再構成になります。
VTOLが画質にどのように影響するかの強力な例については、異なるパラメータに基づいてこれをテストするために両方のドローンを飛行しました。 以下のテストは、私たちの場所で許可されている最低であったため、高度65m(213ft)での最低GSDに基づいています。
高度65m(213ft)で可能な限り最高のGSD
各ドローンの可能な限り低いGSDでのテスト画像。 WingtraOneの42MPフルフレームセンサーは、RX1R IIの三倍以上のGSDと印象的な解像度ライン*で報われます。 同じ高度と同じGSDでのより多くのテスト画像は、テスト画像セクションの下にあります。 注:このレポートのすべての適用範囲の数値は、テスト済みとしてリストされていない限り、リストされた適用範囲に基づいて理論的に計算されます。
*すべてのイメージのための実質の決断は測定誤差を減らすsiemensの良い並ぶ星の測定に基づいています。
WingtraOne pros
- vtol、手打ち上げなし、腹着陸なし、手動で着陸を制御するオプションで完全に自動化、砂利や限られたエリアで安全
- 0.7cm(0.3in)/pxまでGSD
- クラス最高の絶対精度-wingtraone PPK+42MP RX1Rで1cm(0.4in)までIiペイロード
- : 決断のための高い適用範囲—1.4cm(0の190ha(469ac)。55in)/px GSD
- 堅牢な複合ガラス繊維機体
- 重量とアクチュエータは、強風時の安定性と位置適応を提供します
- フライト計画のための頑丈なタブレッ
WingtraOne cons
- 飛行中のカメラ設定を修正
- カスタム標高データはまだありません
- 開発中のサーマルペイロード
- ミッションの一時停止と再開はありません
eBee X pros
- 成熟したミッション計画オプション-一時停止と再開ミッションと 飛行中の調節可能なカメラの設定
- 持久力延長特徴は90分の単一の飛行時間を可能にします、余分費用で来ますが
- 斜めのカメラの選択はS.O.Dと利用RTKが失敗した場合の3D(20MP)
- カスタム標高データ
- PPKオプション
eBee x cons
- 腹着陸—砂利、高い植物や森林のスタンドに損傷を与える可能性があります—予測不可能な着陸エリアは、安全であるために100m2(109yd2)を計画しなければならないことを意味します
- カメラのセンサーが小さく、ピクセル密度が低く、実際の解像度とGSDが1.8cm(0.7in)/px
- 絶対精度が3cm(1.4in)
- Handlaunchは、
- 基地局(タブレット、コンピュータ)が含まれていない経験を持っていない場合、あなたと機器にとって危険なことがあります
評決
eBee Xは十分に確立され、よく工業化されています。 それはまた熱地図を描く解決を特色にする。 それは明らかにmulticopterの性能を上回る良い無人機です。 しかし、着陸は本当の問題であり、無人機の寿命を潜在的に短縮しながら、日常的な使用に挑戦します。 VTOLは、砂利や限られた地域の着陸の問題を解決し、あなたが良いデータ品質が必要な場合は、WingtraOneは大幅に先にあなたを置くでしょう。
比較のためにドローンを提案する
ベンチマークすべきドローンを提案しますか? 私達にあなたの提案を送って下さい。
あなた自身のドローンでテスト画像を撮る
あなたのドローンでテスト画像を撮り、それを共有したい場合は、私たちに知らせてください。
長い読み取り: WingtraOne vs.eBee Xのレビュー
両方の無人偵察機は、プロの調査とマッピング無人偵察機ですが、彼らは彼らの離陸と着陸に顕著な違いを提示します。 これは、彼らが運ぶことができるペイロードだけでなく、結果の画質と精度に影響を与えます。 特徴、詳しいテスト映像および最も重要なspecsの私達の詳細な分析はここにあります。

輸送とハンドリング
eBee X用のハードシェルケースは、標準的なチェックスーツケースのサイズであり、車のトランクに収まることができます。 ハンドルおよび車輪によって、舗装、滑らかな地勢および軽い草で転がることは容易である。 また側面のハンドルによってそれを運ぶことができます。 あなたが必要とするすべては、基地局を除いて内部にあります。 このためには、ラップトップとテレメトリユニットを別々に運ぶ必要があります。
WingtraOneのハードケースは小型車に収まります。 ソフトシェルバックパックの選択は片手のタブレットを含むあなたの全体の基地局を含んでいるWingtraPilotの基地局箱を運んでいる間一人が彼らの背部で事実上どこでも容易そして安全にそれを運ぶことを可能にする。

製品と品質
WingtraOneは、交換可能なサイドスタンドとミドルスタンドを備えた高品質のガラス繊維の機体を持っています。 中間の立場をしっかり止めることは速く、直観的なプロセスである。 地上局として、温度、塵、衝撃/振動および極度な圧力を含む21の環境条件のための軍specのテストに、合格したSamsung Tab活動的な2を得ます。 これは、任意の環境で最大の可視性のために明るさを自動調整する設定を備えています。 基地局はまた電池の充満場所そして二組、またリモート-コントロール単位、遠隔測定工学モジュールおよび風を測定するために風速計を含んでいます。







eBee Xは仕事のビットを取るが、結局しっかり止まるスナップオン/オフ翼が付いている十分工業化された泡の無人機である。 翼を削除することは挑戦ですが、あなたは彼らが上にあると、彼らは安全であることを知っています。 基地局をセットアップするには、テレメトリモジュールをラップトップに接続し、その上で飛行ソフトウェアを実行します。 ノートパソコン上のすべてを持っていることはオフィスで素晴らしいですが、あなたがフィールドに入るとき、それは挑戦です。 ノートパソコンの画面とユニットの可視性と取り扱いは、それぞれ、明るい太陽と荒い建設エリアのようないくつかの条件で問題です。 私たちが飛んだような晴れた日には、何らかの頭上の影がなくても画面がほとんど見えません。







フライト計画と設定
eBee Xフライト前チェックは完全に自動です。 ただし、このプロセスのいずれかの段階が失敗した場合、進行状況があるかどうかを知らずに遅延が発生します。 私たちはこれに直面し、しばらく待った後、それを再起動しました。 再起動後、うまくいきました。
フライト前にオフライン地図をノートパソコンからダウンロードできます。 このソフトウェアは強力で、エリアのブロックと選択したマップ品質設定に基づいてフライトプランを自動生成します。 テレインマッピング、カスタム標高データ、コリドーマッピングオプション、3Dマッピング、飛行中のビューは、豊富な機能の選択を意味します。
WingtraOneのWingtraPilot飛行計画ソフトウェアは明るい太陽および曇った天候両方で扱い易く、見易いタブレットで前もって積まれて来る。 飛行前のチェックリストは、無人機に応答します。 ドローンは、あなたが完了したアイテムとあなたがまだ行う必要があるものをWingtraPilotソフトウェアに通知します。 あなたは明確なプロセスですべてのポイントを一つずつ実行します。 すべてのポイントがチェックされると、飛行する準備が整いました。
ロードされたマップからの標高データを含め、傾斜に沿ったマッピングが必要な飛行領域でWingtraPilotの地形追従機能を有効にすることもできます。 前面と側面の画像が重なるだけでなく、高度とGSDは、アプリで設定するのは簡単です。 あなたが一度にすべての選択肢に圧倒されていないように、インターフェイスが設計されています。 I.e.、あなたが見て、飛行準備のあなたの段階に適用される情報を選択します。
離着陸
eBee Xは古典的な固定翼です。 それを手にして、腹が着地します。 起動するには、あなたはそれにいくつかの揺れを与え、プロペラが開始されます。 刃を避けるために距離を置いておくと、力強い一歩を踏み出すか、前方に飛び乗って放します。
eBee Xは2つの着陸の選択によって腹着陸の間の飛行の制御をリストする:急および線形。 しかし、急な着陸オプションに基づく私たちのテストによると、あなたは実際に無人機が着陸する場所を多くの制御を持っていません。 それはあなたが計画した場所から20メートルも地面に滑り込むことができ、それはかなり速く来ることができます。
固定翼ドローンとして、eBee Xは腹に「落下」しながら制御着陸を行います。 これは無人機、カメラおよび環境への脅威を提起する。 このような着陸は頻繁な損傷につながる可能性があり、多くの信頼性の問題は連続的な衝撃によって引き起こされる可能性があります。 腹着陸は多くの環境でまた不可能である。 荒く、砂利の地勢、限られたスペースまたはふさふさした分野はペイロードおよび技術への損傷の危険を提起する。 最終的には、腹着陸は無人機の寿命を短縮し、あなたの時間と注意の多くを必要とします。 全体として、これは無人機のあなたの投資のROIを減らす。
腹着陸は連続的な衝撃による信頼性問題の頻繁な損傷そして多くをもたらすことができます。
固定翼と比較して、VTOL drone WingtraOneは無人機オペレータから安全な距離で自動的に離陸し、ハイエンドセンサーや高価な無人機自体を傷つけることなくスムーズに着陸
垂直離陸はまた、はるかに優れた障害物回避を可能にします。 手の打ち上げ中に、木、建物、山までの距離を誤って判断する危険性が常にあります。 VTOLでは、そのようなリスクは消えます。 WingtraOneは空にまっすぐに持ち上がり、あなたが選ぶ高度で転移する。
着陸中、ドローンのセンサーが地面を検出すると、ドローンが接触するとモーターが自動的に停止します。 WingtraOneは—砂利で、薮の間で、または森林通路で地勢の範囲を与えられて容易に上陸できる。
無人機の飛行
eBee Xは計画通りに飛行し、3Dビューでラップトップで追跡することができます。 飛行中の任意の時点で、あなたはまた、利便性であるミッションを停止し、再開することができます。 しかし、eBee Xが軽い風であっても不安定であることは明らかです。 SenseFlyはWingtraOneのような風の許容を宣伝していますが、私たちが観察できる動きの量を考えると、これらの条件で撮影された画像の品質に疑問があります。
WingtraOneはスムーズに離陸して着陸し、wingtrapilotソフトウェアを介してタブレット上で飛行を追跡することができます。 高度または遷移角度を調整する必要がある場合は、リモコンの手動モードを選択し、移動方法と着陸方法を選択できます。 手動制御は直観的である。 この無人機は重く、したがってeBee Xよりもアスペクト比が優れているため、傾斜させるにはより多くの風がかかることを意味します。 WingtraOneの四つの強力なアクチュエータは、ドローンのロールとピッチ角の非常に堅牢な制御を可能にします。 ヨー角のみが影響を受けるため、WingtraOneは強風でも天底画像を取得します。 これは風が強い条件の信頼できるイメージの重複を可能にする。
電池および適用範囲
WingtraOneの非証明された李イオンスマートな電池はWingtraPilotに健康状態を送信し、満たすことができます。 Wingtraは55分の飛行時間を宣伝し、これは繰り返しテストされています。
eBee XはVenom3S11.1V LiPoドローン電池を使用しています。 私たちのテスト飛行によると、彼らはうまくいった。 両方のドローンのカバレッジを比較するために、高度57m(187ft)で1.2cm(0.5in)/pxのGSDでそれらを飛行しました。
eBee XはVenom3S11.1V LiPoドローン電池を使用しています。 私たちのテスト飛行によると、彼らはうまくいった。 私たちは飛行し、1.2cm(0.5in)/pxのGSDに基づいてすべての無人偵察機を比較しました。
私たちはAeria XのペイロードでeBeeを飛行し、70ha(173ac)のカバレッジを達成しました。 この場合、WingtraOneは110ha(272ac)をカバーしています。 S.O.D.A.は私達の計算に基づいて64ha(158ac)をカバーする。 つまり、同じGSD—1.2cm(0.5in)/px-WingtraOneのRX1R IIペイロードでは、eBee XのAeria XまたはS.O.D.A.よりも約40%多くカバーされていますが、どちらのカメラを搭載したeBee Xでも、Phantom4RTKなどの任意のマルチコプタードローンよりもはるかに大きなカバレッジを達成していることに注意することが重要です。
どちらのドローンでも、強風時やより高い高度での飛行時間の短縮が観察されることに注意してください。
カメラ
Wingtraはプロジェクトの必要性の範囲のための交換可能な空気の地図を描くカメラの選択を特色にする。 混合された高度に沿った3Dマッピングや、リソースおよび地籍調査のための超精密な測量グレードマップから、マルチスペクトルマッピングまで、選択は Wingtraはまだ熱ペイロードの統合を提供していません。
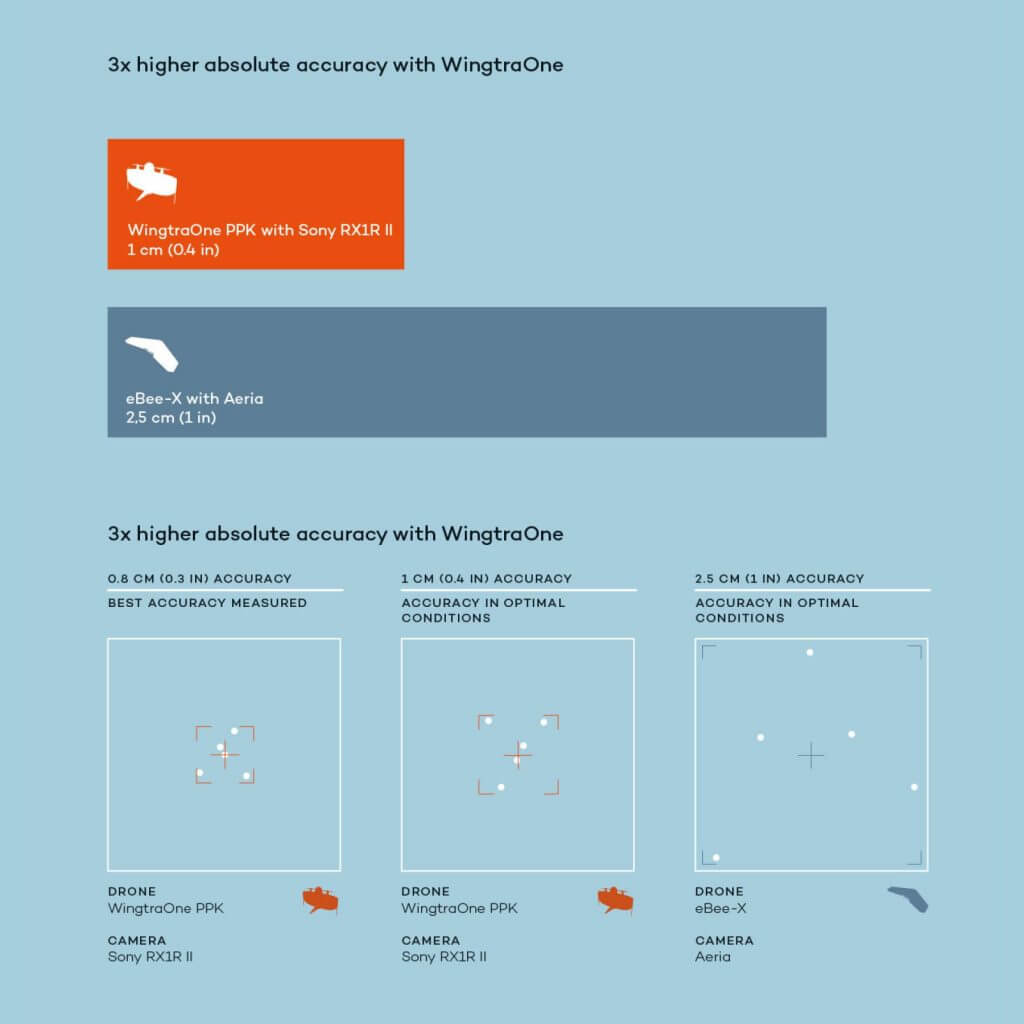
しかし、最も優れたWingtraOneペイロードオプションはSony RX1R II42MPフルフレームです。 このセンサーサイズは、光感度*を向上させ、画像のノイズを低減します。 42MPの解像度は、GSDと絶対精度の両方がクラス最高であることを意味します-0.7cm(0.3in)/pxのGSDと1cm(0.4in)の絶対精度までです。
eBee Xは、3D、コリドー、RGB、マルチスペクトルマッピング用の複数のペイロードオプションも備えています。 SenseFly S.O.D.A. orthomosaicおよび3D表面モデルのための広い視野が付いている光条件の範囲の明確なイメージを捕獲する無人機の写真測量のカメラはある。 1インチセンサーと20MPの解像度を備えたこのカメラは、飛行可能な最低高度である65m(213ft)で1.8cm(0.7in)/pxまでのGSDを達成します。
Aeria Xペイロードは、ノイズ、ぼかし、過度の露出を低減するために記載されているスマート露出技術を備えた無人写真測量カメラです。 その24MPの解像度とトリミングされたAPS-Cセンサーは、1.4cm(0.5cm)のGSDを提供します。6インチ)/px私たちが飛ぶことができる最も低い高度で—65メートル(213フィート)。 f
*RX1R IIのための基本的なISOの感受性の範囲はISO100から25,600からである—50および102,400まで拡張することができる。 S.O.D.A.のリストされたISOの範囲は125-6400であり、AeriaのXは100から6400である。
PPK対RTK/PPKと精度
eBee Xは、バックアップポストプロセスキネマティック(PPK)オプションを備えたリアルタイムキネマティック(RTK)を備えています。 これは、すべてのテレメトリと衛星信号が飛行中一貫して動作する場合、リアルタイムの位置補正のおかげで飛行が完了したときにデータが準備され これらの接続が計画どおりに維持されない場合は、PPKオプションを使用してフライトデータをポスト処理できます。
WingtraOneはPPKオプションを備えています。 PPKは、地上制御点なしで高い絶対位置精度を得るための最も一貫した方法として証明されています。 それに加えて、PPKを使用すると、RTKのように、フィールドにいるたびに接続を設定するために余分な時間を必要としません。
WingtraOne PPK+Sony RX1R IIペイロードにより、1cm(0.4in)までの絶対精度を達成し、証明しました。
私たちのテストによると、S.O.D.A.ペイロードを搭載したeBee Xは、高度65m(213ft)で飛行する1.8cm(0.7in)/pxまでのGSDに達することができます。 精度仕様については、senseFlyはAERIAペイロードの絶対精度をリストしています2.5CM(1in)RTK/PPKを有効にした場合、または高度122m(400ft)で飛行したGcpを使用した場合。
後処理
WingtraOneとeBeeデータの両方が「後処理不可」であるため、Pix4D、3DRのSite Scan、Agisoft、Propellerなどの任意のソフトウェアを使用して結果を実行できます。 あなた自身のシステムに投資する必要がありますが、あなたは最高のあなたに合ったものを選択することができます。 あなたがすでにシステムを持っているなら、あなたは行く準備ができています。
テスト画像と画質
テスト設定
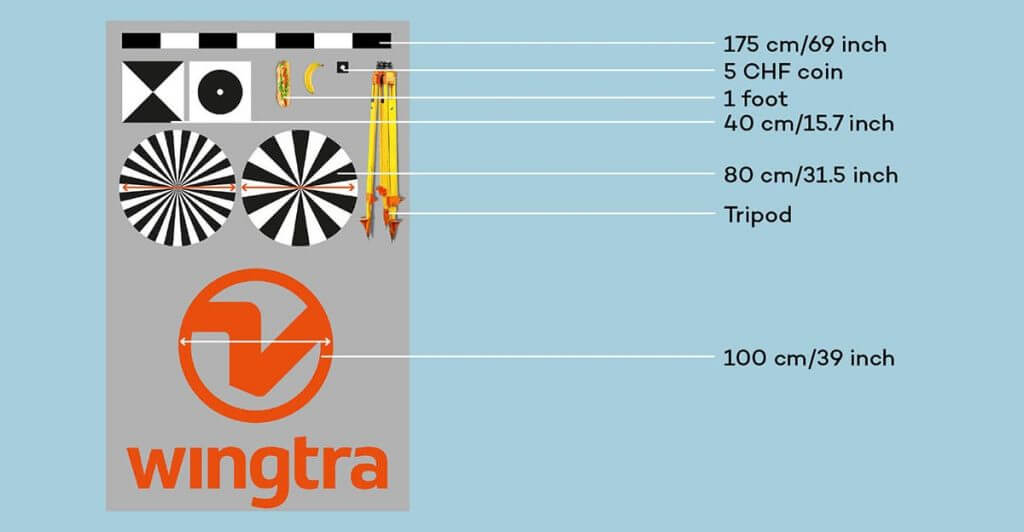
私たちは、可能な限り最高のGSD、同じ高度と同じGSDに基づいて三つの比較テスト画像を得るために両方のドローンを飛 テスト画像として、私たちはあなたがここでダウンロードすることができますカスタムリファレンスポスターを使用しました。 シーメンスの星は、私たちが仕様に従ってGSDと比較した実際の解像度を計算することを可能にしました。
私たちは、に基づいて三つの比較テスト画像を取るために両方のドローンを飛:
- 可能な限り最高のGSD
- 同じ高度
- 同じGSD
可能な限り最高のGSD
この比較フライトでは、カメラの品質の違いがはっきりとわかります。 RX1R IIはS.O.D.A.と同じ高度で二倍のGSDを達成し、アエリアよりもほぼ同じくらい優れています。 絶対精度はGSD値の1〜3倍の範囲である可能性があるため、0.7cm(0.3in)/px以上は結果に大きな違いを意味する可能性があります。
同じ高度—110m(361ft)
RX1R IIを搭載したWingtraOneは、eBee S.O.D.A.と同じ高度でほぼ2倍のGSDを達成しました。
精度に関しては、eBee X S.O.D.A.のように2.6cm(1インチ)のGSDで始めると、絶対精度はこの値に制限され、最大三倍になる可能性があります。 したがって、Sony RX1R IIの低いGSDは本当にここで報われる可能性があります。
同じGSD-1。5cm(0.6in)/px
ご覧のように、同じGSDでも、実際の解像度の計算に示されているように、ノイズの量に基づいて画像が変化します(実際の解像度とgsd値の間の範 しかし、ここでの最大の違いは、カバレッジがほぼ倍であるということです。 つまり、eBee XやS.O.D.A.と同じGSD設定でWingtraOneとRX1R IIを飛行すると、プロジェクトを約40%高速に完了できます!
これらのGsdが達成される高度の45m(148ft)の違いは、ペイロードの品質とそれぞれの場合に可能なカバレッジを確認します。 各無人機の結果のためのGSDと比較される実質の決断の価値はRX1R IIとの良質を明らかにする.
スペック
| エビーエックス | ウィングトラ | |||||||
| ハードウェア | ハードウェア | |||||||
| 翼幅: 116cm(3.8ft) | 翼幅:1.25m(4.1ft)) | |||||||
| 重量:1.4kg(3.1lb) | 重量:3.7kg(8.1lb)空+最大ペイロード重量800g(1.8lb)) | |||||||
| カメラ:senseFly S.O.D.A20MP1″センサー Parrot Sequoia+multispectral and RGB;Micasense RedEdge MX/5.5mm multispectral;senseFly Aeria X24MP APS-Cセンサー;senseFly Duet T thermal and visible spectrum;senseFly S.O.D.A.3D20MP combined nadir and oblique shooting mechanism;senseFly Corridor | カメラ:RGB | カメラ:RGB | カメラ:RGB | カメラ:RGB | カメラ:RGB | カメラ:RGB | カメラ:RGB | カメラ:RGB |
| ソフトウェア | ソフトウェア | |||||||
| 飛行計画および運行:購入と自由な感情ソフトウェア | 飛行計画および運行:WingtraPilot、適用範囲が広い飛行計画の選択との直観的なインターフェイス、遠隔測定 | |||||||
| 画像処理: あなたの好み | 画像処理:不可知論—あなたの好みを選択してください | |||||||
| 機内 | 機内 | |||||||
| 離着陸:手打ち上げと腹着陸 | 離着陸:VTOL | |||||||
| 巡航速度:40-110km/h(25-68mph) | 巡航速度:58km/h(35.8mph)) | |||||||
| 風の抵抗:46までのkph(12.8m/sか28.6mph) | 風の抵抗:巡航の45までのkph(12m/s、28mph)、着陸のための30までのkph(8m/s、18mph) | |||||||
| 最大飛行時間: 59分、最大90分、持久力延長オプション付き(追加料金で提供) | 最大飛行時間:55分 | |||||||
| 自動化:ミッションを一時停止し、飛行中のカメラの設定を変更するオプションで、手の打ち上げ後に完全に | 自動化:完全に手動引き継ぎのためのオプ | |||||||
| 検索結果 | ||||||||
| PPK/RTKオプション:PPKバックアップ付きRTK | PPK/RTKオプション:PPK | |||||||
| Gcpによる絶対精度:3cm以下 | 絶対精度:1cm以下(0.2インチ) | 絶対精度:1cm以下(0.2インチ) | 絶対精度:1cm以下で4) | |||||
| GSDの最小値:1cm/pxまで | Gsdの最小値:0.7cm(0.3インチ) | |||||||
| 高度120m(400ft)での記載されているカバレッジ:220ha(550ac)、senseFly S.O.D.A.と持久力拡張なし、500ha(1,235ac)、senseFly S.O.D.A.3Dと持久力拡張 | 高度110m(361ft)での最大カバレッジ:240ha(593ac)、Sony RX1R IIペイロード、290ha(717ac)とソニー qx1 15mmペイロード |
なぜWingtraOne?
eBeeと比較して、WingtraOneは着陸しないので、より信頼性が高く堅牢な無人機です。 VTOLはまた砂利の地勢を特色にするプロジェクトの場所を地図を描くことを可能にするか、またはebee X.と可能ではない限られたスペースは、このすべての上に、WingtraOneは最もよいデータ質および適用範囲の比率を提供する。 それは同じGSDで40%以上の面積をカバーすることができます。 要求の厳しいプロジェクトでは、3倍の精度に達することができ、1cm(0.4in)の絶対値に達することができます。
なぜeBee Xか。
eBee Xは、着陸して離陸するのに十分な単純な地形とスペースを持つ、より小さく野心的ではないプロジェクトのための、工業化されたオプションです。 必要なデータが1.8cm(0.7インチ)/px GSDおよび3cm(1インチ)の絶対精度を超えない場合に適しています。 それでも、WingtraOneが提供できる解像度、カバレッジ、精度のレベルとは一致しません。
比較のためにドローンを提案する
ベンチマークすべきドローンを提案しますか? 私達にあなたの提案を送って下さい。
あなた自身のドローンでテスト画像を撮る
あなたのドローンでテスト画像を撮り、それを共有したい場合は、私たちに知らせてください。